一種自動(dòng)化碼頭TOS系統(tǒng)優(yōu)化模型:泊位策劃、橋機(jī)計(jì)劃、自動(dòng)配載
當(dāng)前位置:點(diǎn)晴教程→知識(shí)管理交流
→『 企業(yè)管理交流 』
介紹自動(dòng)化碼頭計(jì)算機(jī)管理系統(tǒng)的基本功能模塊,并以泊位策劃、橋機(jī)工作計(jì)劃、自動(dòng)配載為例,介紹TOS中的一些優(yōu)化問題。針對(duì)有單向航道約束的泊位策劃問題,將其轉(zhuǎn)化為組合優(yōu)化中的經(jīng)典二維裝箱問題,并建立整數(shù)線性規(guī)劃模型。利用MATLAB自帶Intlinprog求解器進(jìn)行編程,數(shù)值試驗(yàn)結(jié)果表明該方法具有良好優(yōu)化效果。
引 言 集裝箱碼頭自動(dòng)化包括半自動(dòng)化和全自動(dòng)化。一般認(rèn)為,半自動(dòng)化碼頭是僅有堆場(chǎng)作業(yè)系統(tǒng)實(shí)現(xiàn)自動(dòng)化;全自動(dòng)化碼頭是除堆場(chǎng)作業(yè)系統(tǒng)實(shí)現(xiàn)自動(dòng)化外,水平運(yùn)輸和裝卸船作業(yè)也都實(shí)現(xiàn)自動(dòng)化。1993年,世界上第1個(gè)集裝箱自動(dòng)化碼頭在荷蘭鹿特丹的ECT Delta Sealand正式投產(chǎn)。到目前為止,荷蘭的ECT、Euromax、M II、RWG碼頭,德國(guó)的CTA碼頭,美國(guó)的LBCT、TraPac碼頭,澳大利亞的Patric碼頭,日本的名古屋碼頭以及我國(guó)的廈門遠(yuǎn)海、青島和上海洋山已建成了全自動(dòng)化碼頭。碼頭計(jì)算機(jī)管理系統(tǒng)(Terminal Operation System,TOS)是碼頭正常運(yùn)營(yíng)的基礎(chǔ)和關(guān)鍵,自動(dòng)化集裝箱碼頭的TOS系統(tǒng)在原有TOS系統(tǒng)的基礎(chǔ)上需要重點(diǎn)解決設(shè)備之間的實(shí)時(shí)交互問題,并增加計(jì)劃與控制之間的相互協(xié)同功能。
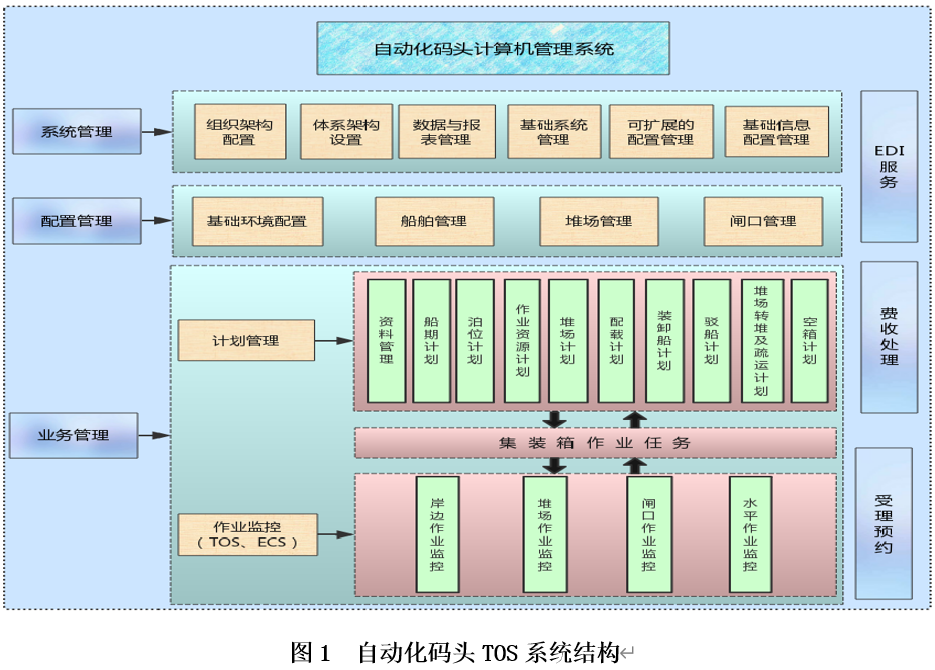
自動(dòng)化碼頭的生產(chǎn)作業(yè)管理系統(tǒng) 目前,國(guó)內(nèi)外的TOS系統(tǒng),主流的有美國(guó)的Navis系統(tǒng)、比利時(shí)的COSMOS系統(tǒng)、韓國(guó)的TBS系統(tǒng)、上海港的TOPS系統(tǒng)等。其中:Navis公司成立于1988 年,是全球首家提供自動(dòng)化集裝箱碼頭管理系統(tǒng)的公司,其提供的TOS系統(tǒng)是全球碼頭運(yùn)營(yíng)商馬士基集裝箱碼頭公司(APM Terminals)、迪拜環(huán)球港務(wù)集團(tuán)(DP World)、美國(guó)總統(tǒng)輪船公司(APL)和菲律賓國(guó)際貨柜碼頭服務(wù)公司(ICTSI)的首選解決方案。上海港在充分吸收國(guó)內(nèi)外先進(jìn)經(jīng)驗(yàn)的基礎(chǔ)之上,研發(fā)基于自動(dòng)化集裝箱碼頭的TOS系統(tǒng),通過橋機(jī)作業(yè)計(jì)劃、實(shí)時(shí)配載以及自動(dòng)發(fā)箱等智能化模塊產(chǎn)生實(shí)時(shí)作業(yè)指令,并通過實(shí)際執(zhí)行結(jié)果進(jìn)行指令的動(dòng)態(tài)調(diào)整。該系統(tǒng)已經(jīng)在上海港洋山自動(dòng)化碼頭投入使用。 TOS系統(tǒng)基本上都是由客戶端、服務(wù)端和后臺(tái)中心數(shù)據(jù)庫(kù)等組成的,并主要以碼頭為單位進(jìn)行部署。服務(wù)端根據(jù)碼頭業(yè)務(wù)的需要,在自動(dòng)化集裝箱碼頭中基本都是采用集群的方式進(jìn)行部署的,根據(jù)業(yè)務(wù)量和交互量大小來決定集群的規(guī)模。自動(dòng)化碼頭TOS系統(tǒng)結(jié)構(gòu)見圖1。
在TOS系統(tǒng)中,涉及的優(yōu)化問題多集中在泊位策劃、作業(yè)資源策劃、自動(dòng)配載和堆場(chǎng)策劃等模塊中。
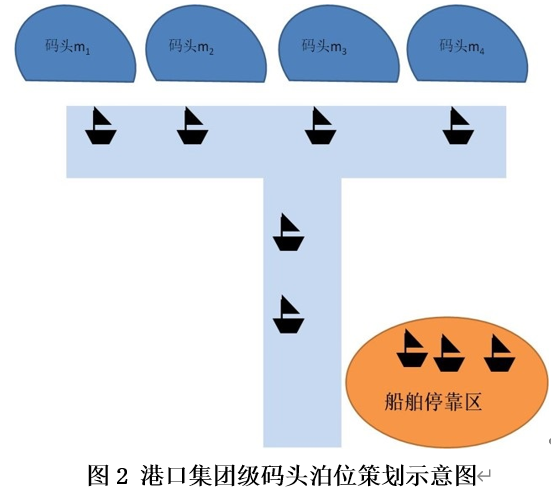
生產(chǎn)作業(yè)管理系統(tǒng)的優(yōu)化問題 2.1 泊位策劃 作為貨物運(yùn)輸進(jìn)入港口的第1步,泊位分配是重要環(huán)節(jié)。合理的泊位分配可以提高集裝箱碼頭的生產(chǎn)效率、減少船舶在港時(shí)間,從而提高集裝箱碼頭競(jìng)爭(zhēng)力。在集裝箱船舶到達(dá)港口之前為其安排停靠點(diǎn)、靠離泊時(shí)間和作業(yè)時(shí)間,直接體現(xiàn)碼頭收納集裝箱船的能力。因此,泊位策劃的質(zhì)量直接影響到整個(gè)碼頭效率。同時(shí),作為后續(xù)裝卸機(jī)械資源安排、作業(yè)計(jì)劃和自動(dòng)配載的先決條件,泊位策劃是自動(dòng)化集裝箱碼頭智能化系統(tǒng)中的“引領(lǐng)者”。 該問題的一般描述為:港口擁有m個(gè)碼頭,每個(gè)碼頭擁有不同的海岸線、吃水深度等,船舶靠泊受運(yùn)送貨物種類、船長(zhǎng)、吃水、優(yōu)先級(jí)和碼頭當(dāng)前停靠情況等綜合因素的限制,泊位策劃是在已知船舶和各碼頭信息的基礎(chǔ)上,對(duì)未來一段時(shí)間內(nèi)每艘船舶靠泊進(jìn)行規(guī)劃,使港口海岸線整體的利用率盡可能大。若m=1,則為單碼頭泊位策劃問題;否則,則為港口集團(tuán)級(jí)碼頭泊位策劃問題。對(duì)于港口集團(tuán)級(jí)碼頭泊位策劃問題,又往往涉及公共航道的管理問題,可稱為帶有航道約束的多碼頭泊位策劃。港口集團(tuán)級(jí)碼頭泊位策劃示意圖見圖2。
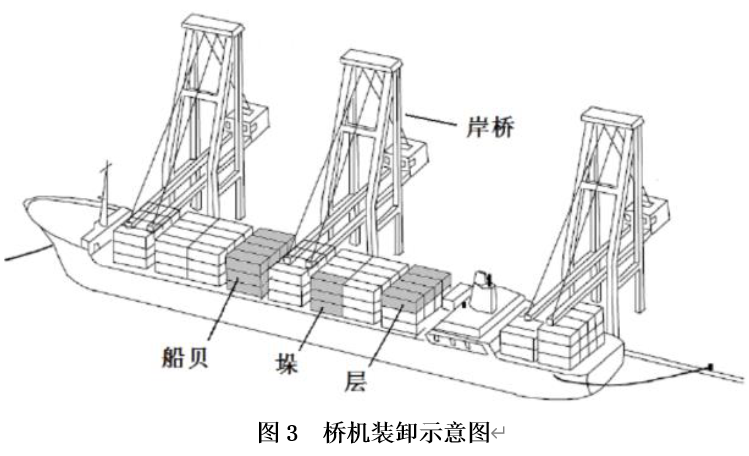
國(guó)內(nèi)外學(xué)者針對(duì)泊位分配與裝卸橋調(diào)度問題展開大量的研究,開發(fā)一系列模型和算法,主要分為2類:一類是離散泊位分配模型,如Nishimura等建立離散泊位分配模型,設(shè)計(jì)基于遺傳算法的求解方法;Imai等在模型中考慮不同船舶營(yíng)運(yùn)人不同停泊優(yōu)先權(quán),設(shè)計(jì)基于遺傳算法的啟發(fā)式算法;Kim等利用模擬退火算法求解離散泊位分配問題。另一類是連續(xù)泊位分配模型,將碼頭岸線看作連續(xù)的整體,根據(jù)船舶長(zhǎng)度依次停泊,Wang等將泊位問題視為多階段決策問題,設(shè)計(jì)基于隨機(jī)束搜索算法的求解方法。在港口作業(yè)這種常常出現(xiàn)各種干擾事件(如惡劣天氣、設(shè)備故障等)的環(huán)境下,常常會(huì)打亂原有的調(diào)度計(jì)劃,降低集裝箱碼頭的作業(yè)效率與服務(wù)水平。因此,需要對(duì)泊位計(jì)劃進(jìn)行調(diào)整,以減少干擾事件對(duì)系統(tǒng)的負(fù)面影響。Tian等和曾慶成等建立泊位分配與裝卸橋調(diào)度干預(yù)管理模型和算法。本文將進(jìn)一步介紹和研究港口集團(tuán)級(jí)碼頭泊位策劃問題的模型和算法。 2.2 橋機(jī)工作計(jì)劃 橋式起重機(jī)(以下簡(jiǎn)稱“橋機(jī)”)作為港口裝卸貨物的主要工具,其工作計(jì)劃的合理制定對(duì)提高裝卸效率起著重要作用。橋機(jī)裝卸示意圖見圖3。船舶靠泊后,由橋機(jī)進(jìn)行集裝箱的裝卸操作,橋機(jī)在工作時(shí)需要滿足諸多約束:
橋機(jī)工作計(jì)劃就是安排可調(diào)用橋機(jī)盡快完成集裝箱裝卸作業(yè),在上述約束條件之下,將完成單船裝卸作業(yè)的工作時(shí)間最小化。橋機(jī)工作計(jì)劃問題是TOS系統(tǒng)的核心問題,得到國(guó)內(nèi)外學(xué)界和產(chǎn)業(yè)界的廣泛關(guān)注。Zhu等[8]以橋機(jī)之間不可交叉移動(dòng)為約束,以橋機(jī)工作時(shí)間最小化為優(yōu)化目標(biāo),利用分支定界和模擬退火算法分別對(duì)模型進(jìn)行求解,最終得到橋機(jī)在不同貝位的工作順序;Daganzo[9]研究橋機(jī)在1個(gè)貝位上工作時(shí)可被打斷的情況,與以往的研究不同,1個(gè)貝位上的工作可由多個(gè)橋機(jī)共同完成,但作者并未考慮橋機(jī)不能交叉移動(dòng)的約束;Kim等將船貝看作是船艙和甲板的集合,考慮橋機(jī)移動(dòng)時(shí)間、不可交叉、安全操作距離等約束建立數(shù)學(xué)規(guī)劃模型,并設(shè)計(jì)分支定界算法和貪婪隨機(jī)自適應(yīng)搜索算法;Moccia等在Kim等的基礎(chǔ)上,提出更加嚴(yán)格的數(shù)學(xué)模型,并提出分支切割算法;Sammarra等在此基礎(chǔ)上又提出一種禁忌搜索方法,通過降低解的質(zhì)量,大幅縮短求解時(shí)間;陸書翔等建立該問題的多目標(biāo)工作計(jì)劃數(shù)學(xué)模型和基于完工時(shí)間下界的近似算法。 2.3 自動(dòng)配載 自動(dòng)配載是指在需要裝船的集裝箱及其在堆場(chǎng)的具體位置已知的前提下,按照船公司的預(yù)配要求給堆場(chǎng)內(nèi)每個(gè)需要裝船的集裝箱安排對(duì)應(yīng)的船舶位置,使總裝卸效益最大。自動(dòng)配載的結(jié)果需要滿足預(yù)配船圖的所有規(guī)則,給出所有需要配載的出口集裝箱對(duì)應(yīng)船艙上的位置,在此基礎(chǔ)上還需要給出每個(gè)集裝箱的裝載順序。因此,自動(dòng)配載的任務(wù)不僅需要考慮集裝箱屬性對(duì)于其最終裝載位置的影響,還需要考慮出口集裝箱的堆場(chǎng)分布和出箱點(diǎn)對(duì)于裝配順序的影響。由于自動(dòng)配載的目標(biāo)就是在保證船公司配載規(guī)則的條件下使碼頭作業(yè)效率最高,因此必須考慮船公司的配載要求。船公司的配載要求中只指定船艙上的列位位置的集裝箱的屬性(特殊箱、卸貨港、高平箱和箱尺寸等),所以該問題可以抽象成如下集合匹配問題:列位位置集合S={s1,s2,…,sn},預(yù)裝集裝箱集合T={t1,t2,…,tn}。每個(gè)集裝箱的屬性(重量、尺寸、卸貨港等)已知,每個(gè)列位位置規(guī)定所放集裝箱滿足的屬性已知。需要建立1個(gè)映射f:S→T在滿足每個(gè)位置對(duì)應(yīng)的箱子屬性要求的前提下,使碼頭裝卸效率最高(橋機(jī)效率高、翻箱量少、堆場(chǎng)設(shè)備無謂移動(dòng)少等)。 Wilson等對(duì)自動(dòng)配載問題提出兩階段分塊求解策略;Kang等在此基礎(chǔ)上進(jìn)行了進(jìn)一步研究;張維英等采用基于二叉搜索樹的啟發(fā)式裝箱算法求解;Delgado等給出了一種快速的近似算法。
港口泊位策劃模型和算法 考慮到帶有航道約束的多碼頭泊位策劃問題,采用連續(xù)型泊位分配方法,在優(yōu)化泊位方案的同時(shí)考慮單向航道進(jìn)出的問題。模型假設(shè)如下:
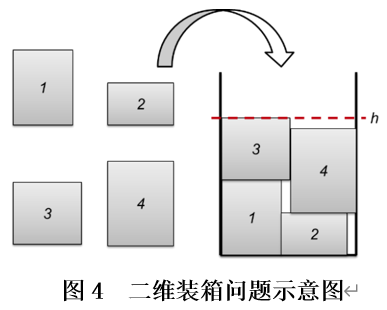
本文中,將泊位策劃問題轉(zhuǎn)化為二維裝箱問題(Two-Dimensional BinPacking Problem,2DBPP)。經(jīng)典的二維裝箱問題為:給定1定數(shù)量的小矩形,給定1個(gè)大矩形,將所有的小矩形裝入大矩形中,使得裝入高度最低。二維裝箱問題示意圖見圖4。
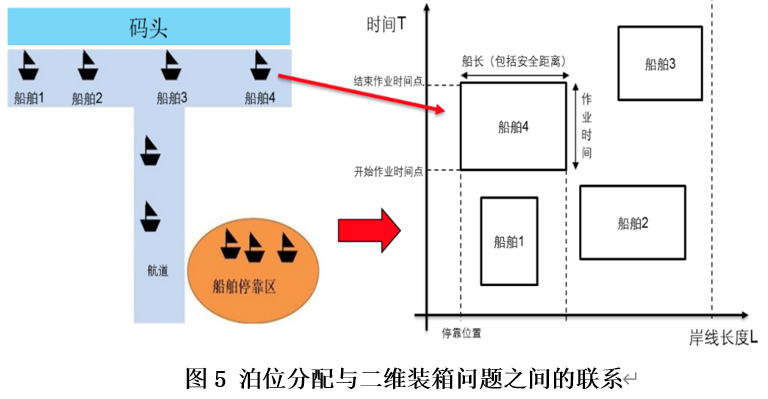
將二維裝箱問題與泊位策劃模型聯(lián)系起來,泊位分配與二維裝箱問題之間的聯(lián)系見圖5。圖中左邊的船舶1至船舶4對(duì)應(yīng)右側(cè)中的矩形。也就是說,1個(gè)矩形就代表了1艘船只的泊位分配。因此,要求右圖所有的矩形不重合,并按一定約束裝入該“大矩形”,使總作業(yè)時(shí)間盡可能地少。
3.1 模型參數(shù)、目標(biāo)和約束條件 方案目標(biāo)為最后一艘船只離開港口的時(shí)間點(diǎn)減去第一艘船只到港的時(shí)間點(diǎn)的間隔時(shí)間最小化,該時(shí)間差代表所有船只從開始到結(jié)束作業(yè)所用時(shí)間的總和。因此,該模型的目標(biāo)函數(shù)為
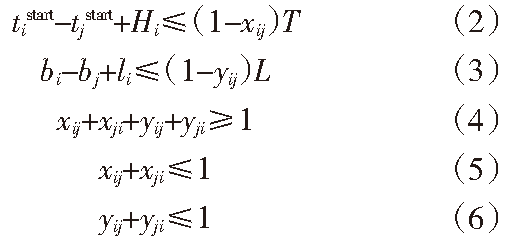
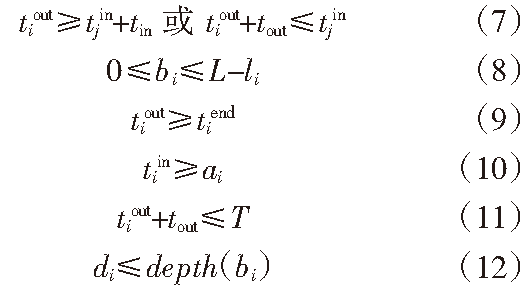
模型約束條件為
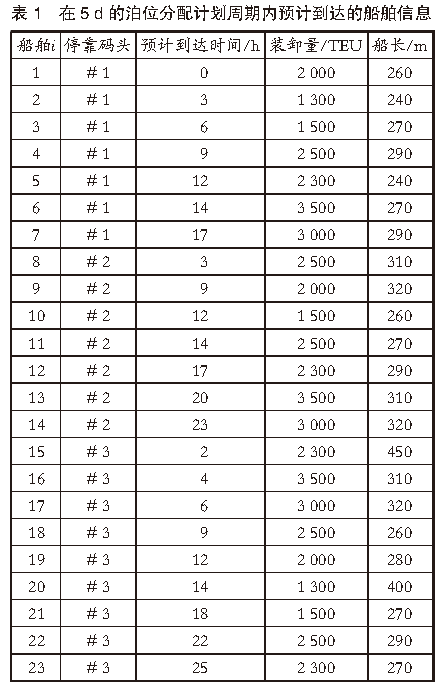
式中:i∈N(i=1,...,n)為n艘船只集合;L為碼頭岸線長(zhǎng);T為規(guī)劃時(shí)間;li為每艘船的長(zhǎng)度,包含安全距離;di為每艘船的吃水深度;ai為每艘船預(yù)計(jì)到達(dá)的時(shí)間;Hi為每艘船作業(yè)時(shí)間;tin為駛?cè)牒降浪钑r(shí)間;tout為駛出航道所需時(shí)間;Vi為每艘船的速度;Wi為每艘船的貨物量;depth(bi)為停靠位置bi處能承受的最深出水深度;bi為船舶停靠位置;tiin為船舶駛?cè)牒降赖臅r(shí)間點(diǎn);tistart為船舶開始裝卸作業(yè)的時(shí)間點(diǎn);tiend為船舶結(jié)束作業(yè)的時(shí)間點(diǎn);tiout為船舶駛出航道的時(shí)間點(diǎn),xij表示若船舶i完全在j的左方,則為1,否則為0;yij表示若船舶i完全在j的下方,則為1,否則為0。 約束(2)~(6)保證船只作業(yè)計(jì)劃在二維圖上不重疊,約束(7)保證航道單向的特點(diǎn),約束(8)保證停靠位置在岸線范圍內(nèi),約束(9)保證駛出時(shí)刻一定在結(jié)束作業(yè)時(shí)刻之后,約束(10)保證駛?cè)牒降罆r(shí)間一定在到港時(shí)間之后,約束(11)保證作業(yè)時(shí)間一定在規(guī)劃時(shí)間之內(nèi),約束(12)保證船只停靠的位置符合船只吃水深度。顯然,若遇到多個(gè)碼頭的情況,只需將L分為多個(gè)Li,然后對(duì)bi進(jìn)行約束即可。 3.2 模型求解 MATLAB中Intlinprog進(jìn)行整數(shù)線性規(guī)劃編程。在實(shí)驗(yàn)數(shù)據(jù)的設(shè)計(jì)上,一共模擬23艘船只,這些船只需要分別停靠在港口的3個(gè)碼頭,在5 d的泊位分配計(jì)劃周期內(nèi)預(yù)計(jì)到達(dá)的船舶信息見表1,其中包含船只預(yù)計(jì)到達(dá)時(shí)間、船舶的裝載量以及船長(zhǎng)。
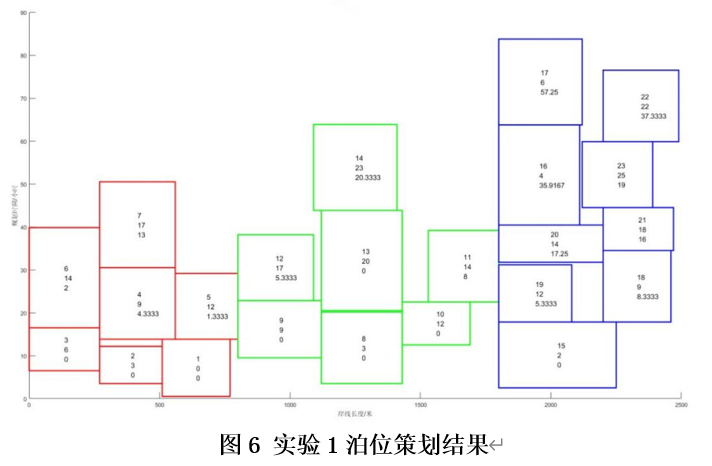
假設(shè)# 1碼頭岸線為0~800 m,# 2碼頭岸線為800~1 800 m,#3碼頭岸線為1 800~ 2 500 m,假設(shè)每個(gè)碼頭裝卸效率為150自然箱/h,碼頭泊位水深都能滿足船只吃水線要求。在此基礎(chǔ)上運(yùn)行程序240 s,得到泊位分配計(jì)劃,實(shí)驗(yàn)1泊位策劃結(jié)果見圖6。其中,左側(cè)3列、中間3列、右側(cè)2列方框分別表示只能停靠# 1、# 2、# 3碼頭。方框中,第1個(gè)數(shù)字代表第i艘船,第2個(gè)數(shù)字代表船只到達(dá)時(shí)間,第3個(gè)數(shù)字代表在停靠區(qū)域等待時(shí)間,需要盡量讓船只在完成手續(xù)的前提下盡快作業(yè),因此等待時(shí)間越短越好。
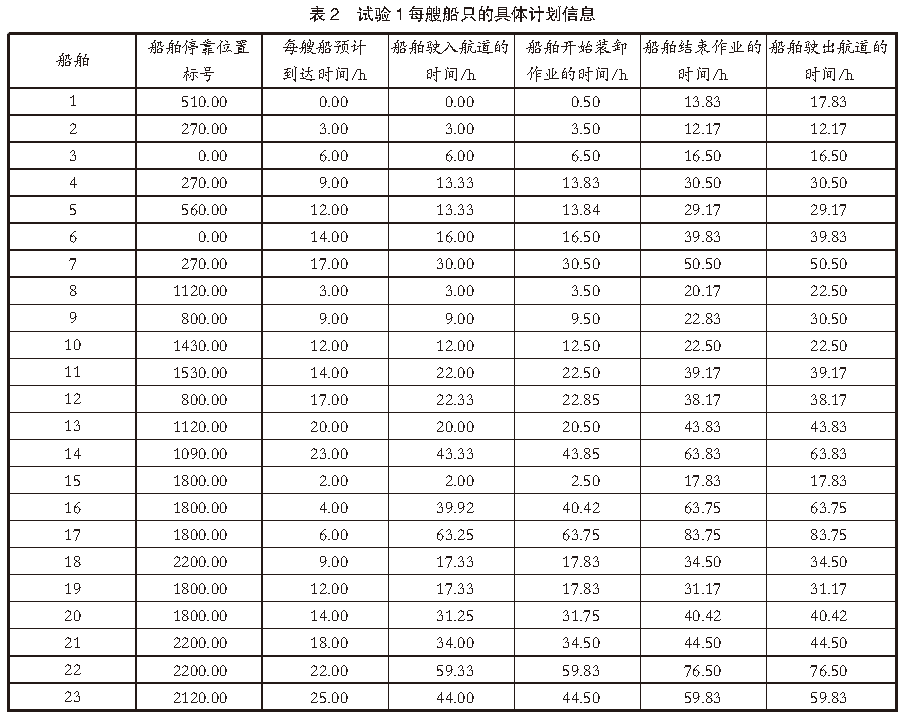
在完成泊位計(jì)劃后,該情況下的航道占有情況也相應(yīng)而出。 最后得到23艘船在港作業(yè)總時(shí)間為84.5h。試驗(yàn)1每艘船只的具體計(jì)劃信息見表2。表2的每一列將船只的具體停靠位置、具體進(jìn)出港口的時(shí)間點(diǎn)、作業(yè)時(shí)間、等待時(shí)常都相應(yīng)地表示出來,在泊位策劃時(shí)可將此表作為參考來進(jìn)行船只的排位,并進(jìn)行單向航道的具體規(guī)劃。由航道規(guī)劃可知,航道進(jìn)出的時(shí)間就整個(gè)5 d的規(guī)劃長(zhǎng)度來說較為離散。因此,在實(shí)際運(yùn)用中,可以人為地對(duì)航道進(jìn)出時(shí)間進(jìn)行調(diào)試,而不會(huì)影響到整體的規(guī)劃。由圖6可以看出,二維圖中的空缺處較少,可知每個(gè)碼頭的碼頭利用率較高。船只的長(zhǎng)度有400 m量級(jí)的大船,也有200 m量級(jí)的小船,總體符合港口實(shí)際情況。
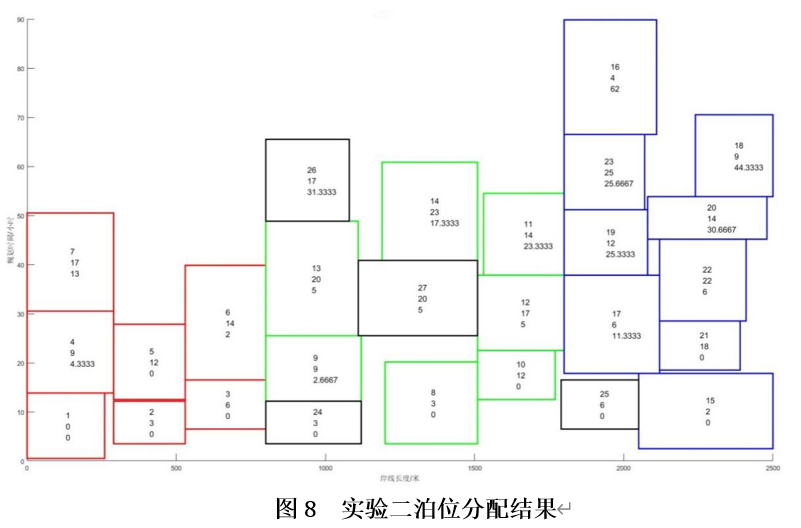
考慮到部分船舶可以停靠任意碼頭。因此,在原來數(shù)據(jù)基礎(chǔ)上,新增4艘可以停靠任意碼頭的船舶,新增船舶信息見表3,其他參數(shù)不變,重新運(yùn)行程序,經(jīng)過1 400 s的計(jì)算,試驗(yàn)2泊位分配結(jié)果見圖8,其中最優(yōu)在港時(shí)間為90.58 h。
該文章在 2025/3/28 18:28:54 編輯過 |
關(guān)鍵字查詢
相關(guān)文章
正在查詢... 晴ERP是一款針對(duì)中小制造業(yè)的專業(yè)生產(chǎn)管理軟件系統(tǒng),系統(tǒng)成熟度和易用性得到了國(guó)內(nèi)大量中小企業(yè)的青睞。")
晴PMS碼頭管理系統(tǒng)主要針對(duì)港口碼頭集裝箱與散貨日常運(yùn)作、調(diào)度、堆場(chǎng)、車隊(duì)、財(cái)務(wù)費(fèi)用、相關(guān)報(bào)表等業(yè)務(wù)管理,結(jié)合碼頭的業(yè)務(wù)特點(diǎn),圍繞調(diào)度、堆場(chǎng)作業(yè)而開發(fā)的。集技術(shù)的先進(jìn)性、管理的有效性于一體,是物流碼頭及其他港口類企業(yè)的高效ERP管理信息系統(tǒng)。")
晴WMS倉(cāng)儲(chǔ)管理系統(tǒng)提供了貨物產(chǎn)品管理,銷售管理,采購(gòu)管理,倉(cāng)儲(chǔ)管理,倉(cāng)庫(kù)管理,保質(zhì)期管理,貨位管理,庫(kù)位管理,生產(chǎn)管理,WMS管理系統(tǒng),標(biāo)簽打印,條形碼,二維碼管理,批號(hào)管理軟件。")
晴免費(fèi)OA是一款軟件和通用服務(wù)都免費(fèi),不限功能、不限時(shí)間、不限用戶的免費(fèi)OA協(xié)同辦公管理系統(tǒng)。")
|


 400 186 1886
400 186 1886
晴公司官網(wǎng)")